Point Cloud and 3D Modeling (NPM3D)

We created a website for Datasets and Benchmarks on 3D Point Clouds: https://npm3d.fr/
Research TOPIC NPM3D
NPM3D ("Nuage de Points et Modélisation 3D" in french) is a research topic in Centre for Robotics on 3D Point Clouds (from LiDAR and RGB-D sensors)
Main subjects of the NMP3D research topic are:
- Terrestrial mobile LiDAR systems
- LiDAR-only Simultaneous Localization And Mapping (SLAM)
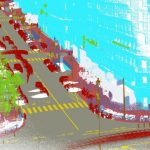
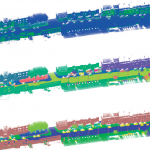
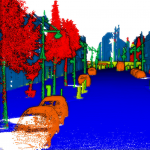
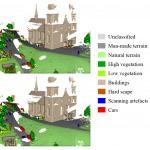
- 3D Perception for autonomous systems (semantic segmentation, 3D detection)
- Deep Learning for 3D points clouds
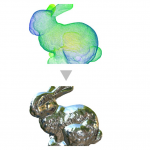
- Point cloud rendering
People
Permanent staff:
- Jean-Emmanuel Deschaud: Associate Professor (Chargé de Recherche HDR), Mines Paris - PSL, jean-emmanuel.deschaud@mines-paristech.fr
External Collaborator:
- François Goulette: Full Professor, Deputy Director U2IS, ENSTA Paris, francois.goulette@ensta-paris.fr
PhD students:
- Samir Abou-Haidar (2022-): Deep neural networks on 3D point cloud adapted to embedded architectures. In collaboration with Cyril Joly and CEA LIAE lab (Alexandre Chariot and Mehdi Darouich)
- Hugo Blanc (2022-): Physico-realistic differentiable rendering of point clouds for interactive visualization of real environments, and applications to cultural heritage. In collaboration with Alexis Paljic.
- Fabio Elnecave Xavier (2022-): Odometry and 3D Reconstruction of the Close Environment of a Leg Exoskeleton. In collaboration with François Goulette and Wandercraft (Guillaume Burger and Marine Petriaux)
- Louis Soum-Fontez (2021-): Unsupervised real-time object detection from LiDAR data. In collaboration with François Goulette.
Former PhD students:
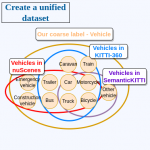
- Jules Sanchez (2020-2023): Domain generalization of LiDAR semantic segmentation for autonomous vehicles. In collaboration with François Goulette (working now at SNCF Réseau as R&D engineer)
- Pierre Dellenbach (2020-2023): Exploring LiDAR Odometries through Classical, Deep and Inertial perspectives. In collaboration with François Goulette from ENSTA Paris and Raphaël Cazorla from Kitware (working now at ChapsVision Group as R&D engineer)
- Jean-Pierre Richa (2019-2022): Urban Scene Modeling From 3D Point Clouds and Massive LiDAR Simulation for Autonomous Vehicles (working now at Outsight as R&D engineer)
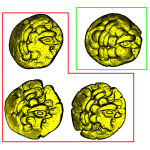
- Sofiane Horache (2019-2022): Pattern comparison on 3D point clouds and application on Celtic coins and objects (working now at TheraPanacea as R&D engineer)
- David Duque (2018-2021): 3D urban scene understanding by analysis of LiDAR, color and hyperspectral data (working now in the start-up Thecrossproduct as R&D engineer)
- Hugues Thomas (2016-2019): Learning new representations for 3D point cloud semantization (now Post-Doc at University of Toronto)
- Xavier Roynard (2015-2019): On-the-fly semantization of 3D point clouds acquired by embedded systems (working now at SAFRAN as R&D engineer)
- Hassan Bouchiba (2014-2018): Contributions in point-based processing for rendering and simulation in fluid mechanics (now co-founder of the start-up Exwayz)
- Houssem Nouira (2013-2016): Point cloud refinement with self-calibration of a mobile multi-beam lidar (working now at MENSI/TRIMBLE as R&D engineer)
PUBLICATIONS
2023


Multi-IMU Proprioceptive State Estimator for Humanoid Robots
F. Elnecave Xavier, G. Burger, M. Petriaux, J.-E. Deschaud, F. Goulette
IROS, 2023
Paper
2022
2021



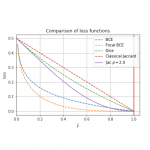
On power Jaccard losses for semantic segmentation
D. Duque-Arias, S. Velasco-Forero, J.-E. Deschaud, F. Goulette, A. Serna, E. Decencière, B. Marcotegui
VISAPP, 2021
Paper
2020
SHREC 2020 Track: 3D Point Cloud Semantic Segmentation for Street Scenes
T. Ku, R. C. Veltkamp, B. Boom, D. Duque-Arias, S. Velasco-Forero, J.-E. Deschaud, F. Goulette, B. Marcotegui, S. Ortega, A. Trujillo, J. Pablo Suárez, J. Miguel Santana, C. Ramírez, K. Akadas, S. Gangisetty
Computer & Graphics, 2020
Paper

Computational Fluid Dynamics on 3D Point Set Surfaces
H. Bouchiba, S. Santoso, J.-E Deschaud, L. Rocha-Da-Silva, F. Goulette, T. Coupez
Journal of Computational Physics, 2020
Paper
2019

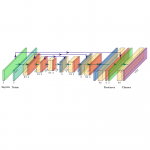
KPConv: Flexible and Deformable Convolution for Point Clouds
H. Thomas, C. R. Qi, J.-E. Deschaud, B. Marcotegui, F. Goulette, L. J. Guibas
ICCV, 2019
Paper GitHub TensorFlow GitHub PyTorch

A Graph-based Color Lines model for image analysis
D. Duque-Arias, S. Velasco-Forero, F. Goulette, J.-E. Deschaud, B. Marcotegui
ICIAP, 2019
Paper
2018
Semantic Classification of 3D Point Clouds with Multiscale Spherical Neighborhoods
H. Thomas, J.-E. Deschaud, B. Marcotegui, F. Goulette, Y. Le Gall
3DV, 2018
Paper

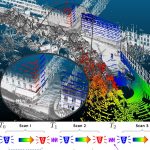
IMLS-SLAM: scan-to-model matching based on 3D data
J.-E. Deschaud
ICRA, 2018
Paper
2017
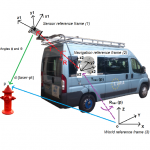
Point Cloud Refinement with Self-calibration of a mobile multi-beam Lidar Sensor
H. Nouira, J.-E. Deschaud, F. Goulette
The Photogrammetric Record, 2017
Paper
Current research projects
- CIFRE thesis with Wandercraft (2022-2025): bring near 3D Vision for exoskeletons. Wandercraft Website
- European project 5GMed (H2020, 2021-2024): LiDAR object detection through 5G for railway cases. Project Website
PAST research projects
- CIFRE thesis with Kitware (2021-2023): improve LiDAR SLAM. Kitware Website
- Research project with ANSYS (2020-2022): simulating LiDAR sensors with real LiDAR data. ANSYS Website
- FUI24 REPLICA Project (2018-2022) : The REPLICA project was on complement existing simulation platforms with new bricks in order to bridge the gap expected in autonomous vehicle testing. Project Website
SPONSORS
We want to thank the sponsors below:
![]()
Zulip is an open-source modern team chat app designed to keep both live and asynchronous conversations organized. Zulip Website