The Centre for Robotics is proud to announce that the PhD Defense of Arthur MOREAU will take place on Thursday, April 27th at MINES PARIS.
The subject of the work is:
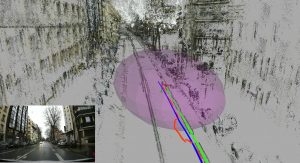
“Learning-based algorithms for real-time visual localization of mobile robots”
This research is the result of a collaboration between our Centre and Huawei France.
The PhD has been directed by Arnaud de La Fortelle, and supervized by Bogdan Stanciulescu.
To attend:
MINES PARIS
60, Saint-Michel boulevard, Paris.
Jury members:
Valérie GOUET-BRUNET, Research Director, LASTIG – National Institute for Geographical and Forest Information (IGN)
Patric JANSFELT, Full Professor, KTH Royal Institute of Technology, Sweden
Vincent LEPETIT, Research Director, École des ponts ParisTech
Bogdan STANCIULESCU, Associate Professor, MINES PARIS
Arnaud de La Fortelle, HDR, CEO Heex Technologies
Dzmitry TSISHKOU, PhD, Huawei Technologies France
Abstract:
This PhD investigates visual-based algorithms for real-time localization of mobile robots. The core objective is to provide a reliable solution to the vehicle relocalization problem in large urban environments using camera images as input. Thanks to computer vision progress and low cost sensors, visual-based localization is an appealing solution, where the best performing methods use structure-based pipelines with high computational cost and memory footprint. On the other hand, learning-based approaches connect images and camera poses in an end-to-end fashion, matching real time embedded processing requirements. This PhD aims to push forward learning-based methods on several aspects: localization accuracy, uncertainty quantification, robustness to real-world conditions and easier adaptation to unseen maps. These limitations can be addressed in many ways: using Bayesian Deep Learning tools to provide uncertainty quantification of the model outputs; adapting the spatial and visual distribution of the training examples to increase robustness and reliability of the learned models; designing better model architecture to take in account geometrical clues within the learning process in order to reach state of the art accuracy for a tiny fraction of the computational cost of classical geometric pipelines. The resulting system is intended to be used as a scalable and reliable localization system for automated vehicles.