This thesis was realized in collaboration between Mines Paris - PSL and Ansys under the direction of François Goulette and Jean-Emmanuel Deschaud of the Center of Robotics of Mines Paris - PSL, as well as Nicolas Dalmasso, Nassim Jibai, and David Ganieux from Ansys.
The defense took place on Thursday 08 December 2022 at Mines Paris - PSL.
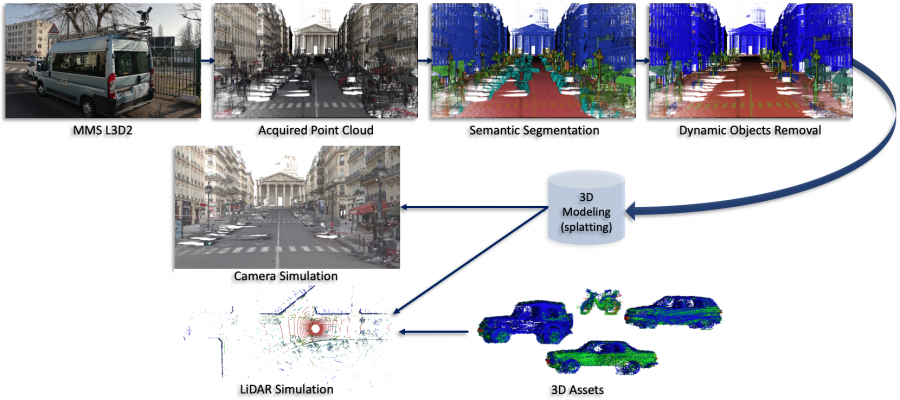
Summary of the PhD thesis: development of autonomous vehicles and testing can be achieved by simulating the different sensors in a virtual environment. However, manually handcrafted virtual environments fail to generalize to real-world scenes, due to the over-simplified models used in such environments. In this thesis, we propose to reduce this domain gap by leveraging real-world scans of urban scenes in the form of 3D point clouds acquired using a LiDAR sensor mounted on a mobile mapping system. Toward this end, we propose an automatic simulation pipeline. The pipeline introduces an accurate scene modeling method based on semantic adaptive splatting to create the virtual environment and a real-time LiDAR simulation.
Congratulations to Jean-Pierre !!!


